URWPGSim2D Software
1 Platform IntroductionThe software URWPGSim2D (Underwater Robot Water Polo Game Simulator 2D Edition) is used as the game platform in 2D group of 2012 China Underwater Robot Games. The simulators include URWPGSim2DServer and URWPGSim2DClient. The server simulates underwater game environment, controls and displays the process and result of the game and sends real-time game environment and process information. The semi-distributed client simulates game teams, loads game strategy, processes decision computation and sends decision results to the server.
2 Hardware EnvironmentThe platform runs on a PC or workstation with hardware configuration as the following table.
Components |
Minimum Configuration |
Recommended Configuration |
CPU |
Intel P4 2.0GHz or similar AMD CPU |
Intel E7300 2.66GHz or higher |
Memory |
256MB |
2GB or more |
Video Card |
Video Card Support DirectX 9.0,Pixel Shader 3.0,video memory 128M or more |
|
Harddisk |
10GB |
80GB or more |
OS:Windows XP Professional SP3,Windows Vista或Windows 7。
.Net Framework:.Net Framework 3.5 with SP1。 MRDS:Microsoft Robotics Developer Studio 2008 R3。 Accessory:Microsoft XNA Framework Redistributable 3.1,Microsoft Excel 2003 Com Library。
4.1 Installing Standard Platform
- Install Windows XP Professional SP3 on a PC or workstation.
- InstallDotNet3.5SP1andXNA3.1with the default setting.。
- Install URWPGSim2D software package, which includes necessary MRDS and Excel component.
URWPGSim2D provides two running modes: Local mode and Remote mode.
Local mode is provided to all teams for debugging game strategy roughly. In Local mode, only one process URWPGSim2DServer.exe needs to be launched on the server. The strategy module (dll file) is loaded on the server directly and the computing process of all strategies and simulation cycle process on the server share the same process space.
Remote mode is used for actual games. In remote mode, one process needs to be launched on the server and several processes on the clients. The number of clients is the same as that of teams which participate in current game, i.e., in a 1vs1 game, the number of teams is 2 and 2 client processes need to be launched. The client processes can be launched on several computers or one computer or the server. Whatever topology structure is used, the decision computing process of each team runs in different and independent client process space.
Due to the difference of data exchange methods between Local mode and Remote mode, the strategy which works well in Local mode will not always have expected effect in Remote mode. Thus, all teams must debug their strategies in Local mode preliminarily and then test and modify those in Remote mode.
5.1 Simulation Field
The 2D model definition, structure and size of simulation field are the same as those of real pool. As shown in figure 1.
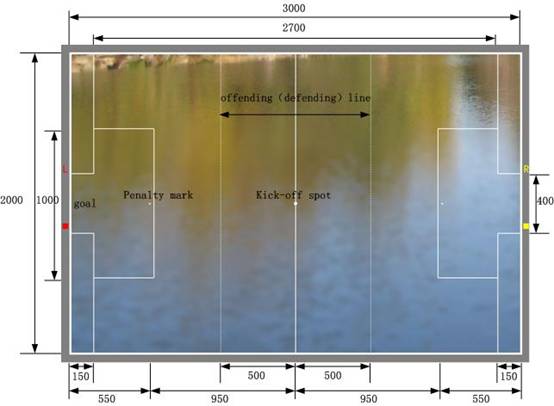
Figure 1 Simulation field
5.2 Simulation Robotic FishThe 2D model definition, structure and size of simulation robotic fish are almost the same as those of real robotic fish.
- Structure: 1 arc-shaped head, 1 rectangular body, 1 tail composed of 3 connected isosceles, 1 crescent caudal fin and 2 fan pectoral fins.
- Size: radius of head arc is 30mm; the body rectangle is 150mm long and 44mm wide; the straight length of 3 tail joints are70mm, 54mm and 54mm, and the upper lines are 18.59mm, 12.49mm and 6.246mm long; the upper line of caudal fin is 4.858mm long with the bottom line 105mm long (between 2 poles of caudal fin) and 64.8mm high (between the midpoints of upper line an bottom line); the straight line of pectoral fin is 75mm long while the arc is 45mm wide and 50mm long at most.
- Color: default color of fish body is red and the color of simulation robotic fish in one team is identical; the color of number on the body is black; in antagonistic game, default color of robotic fish in opponent team is yellow.
2D model of simulation water polo is a round with 58mm-long radius.
5.4 Simulation Robotic Fish TeamThe number of team and simulation robotic fish in different game will be defined in specific game rules.
5.5 Simulation Game TimingAll 2D simulation games are under countdown system. Total game time can be 10 minutes, 5 minutes or 3 minutes according to specific game rules The countdown timer on the server of game platform displays time left for current game with 1 second as the decreasing unit. The details are as the following. Total time of the game (e.g. 10 minutes) is divided by simulation cycle period set by the game platform (e.g. 100 milliseconds) and converted to number of simulation cycles gfVFS v V (10×60×1000/100=6000). The game platform will set the number of cycles left with initial value as number of total simulation cycles. As time goes, the cycles left are converted and rounded to the time left which is shown in the form of “mm:ss”.
5.6 Simulation Game ScoreThe scoreboard on the server of game platform shows real-time score of each team in current game with 1 point as increasing unit. By the end of the game, the score shown on the scoreboard will be the final score of each team.





